# Быстрая настройка для ручного пилотирования
Перейдите по ссылке и найдите соответствующий раздел (рисунок ниже):

Или следуйте следующей инструкции:
### Установка QGroundControl
**QGroundControl** – программное обеспечение, необходимое для прошивки, настройки и калибровки полетного контроллера Клевера.
Скачайте и установите установочный файл для Windows/Linux/macOS с [официального сайта QGroundControl](http://qgroundcontrol.com/downloads/). В случае необходимости согласитесь с установкой дополнительных драйверов при установке.
См. также [основную документацию по QGroundControl](https://docs.qgroundcontrol.com/en/).
### MicroSD-карта
Подготовьте MicroSD-карту для полетного контроллера.

* Установите карту в компьютер (используйте адаптер при необходимости).
* Отформатируйте карту в файловую систему FAT32. Для этого кликните на значок SD-карты в "Проводнике" и нажмите "Форматирование" в Windows. Используйте "Дисковую утилиту" в macOS.
* Выполните "Безопасное извлечение" карты, извлеките карту.
* Установите карту в полетный контроллер.
### Загрузка прошивки в полетный контроллер
Основная статья: .
> Перед осуществлением перепрошивки Pixracer не должен быть подключен к компьютеру по USB.
Для Клевера, в особенности для осуществления автономных полетов, рекомендуется использовать версию прошивки PX4 от Copter Express. Скачайте актуальную версию прошивки на GitHub — [**v1.8.2-clover.13**](https://github.com/CopterExpress/Firmware/releases/download/v1.8.2-clover.13/px4fmu-v4_default.px4).
> Для квадрокоптеров с Pixhawk (Клевер 2) существует отдельная версия прошивки. Подробности смотрите в статье "[Прошивка полетного контроллера](https://clover.coex.tech/ru/firmware.html)".
Загрузите прошивку в полетный контролер:
1. Запустите программу QGroundControl.
2. Зайдите во вкладку *Vehicle Setup*.
3. Выберите меню *Firmware*.
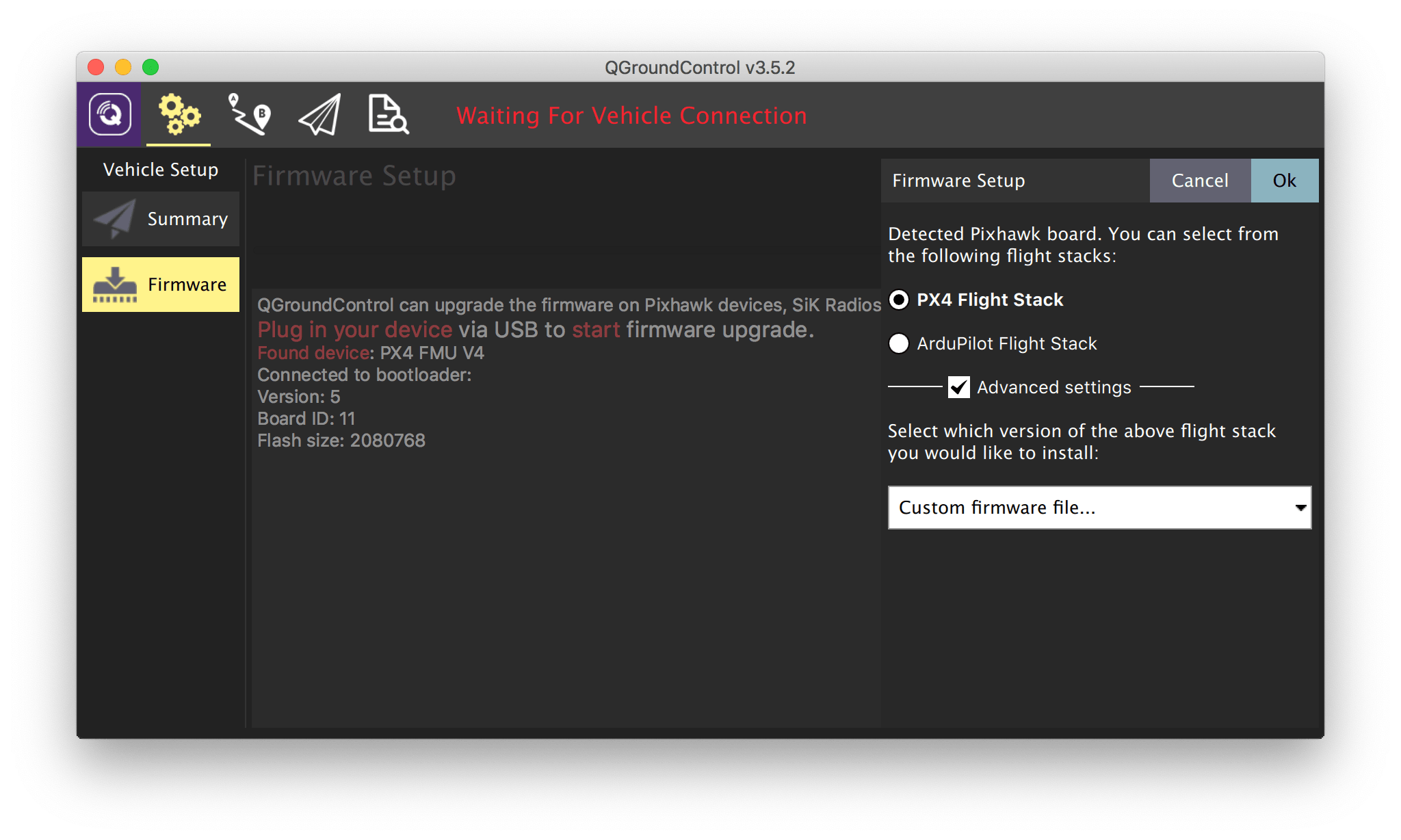
4. Подключите Pixracer к компьютеру по USB.
5. Дождитесь подключения Pixracer к QGroundControl.
6. Выберите в меню справа *PX4 Flight Stack*.
Для загрузки прошивки от Copter Express (рекомендуется):
* Выберите *Advanced settings*.
* В выпадающем меню выберите *Custom firmware file...*
* Нажмите *OK* и выберите скаченный файл прошивки.
Для загрузки последней версии стандартной прошивки сразу нажмите *OK*.
Дождитесь, пока QGroundControl загрузит прошивку и выполнит перезагрузку полетного контроллера.
> Не отключайте полетный контроллер от компьютера в процессе загрузки прошивки.
Дополнительную информацию о прошивке читайте в статье "[Прошивка Pixhawk](https://clover.coex.tech/ru/firmware.html)".
### Настройка полетного контроллера
> Все дальнейшие настройки и калибровки полетного контроллера могут быть выполнены без проводов с применением [доступа к полетному контроллеру по Wi-Fi через Raspberry Pi](https://clover.coex.tech/ru/gcs_bridge.html).
Обзор главного окна настроек QGroundControl:
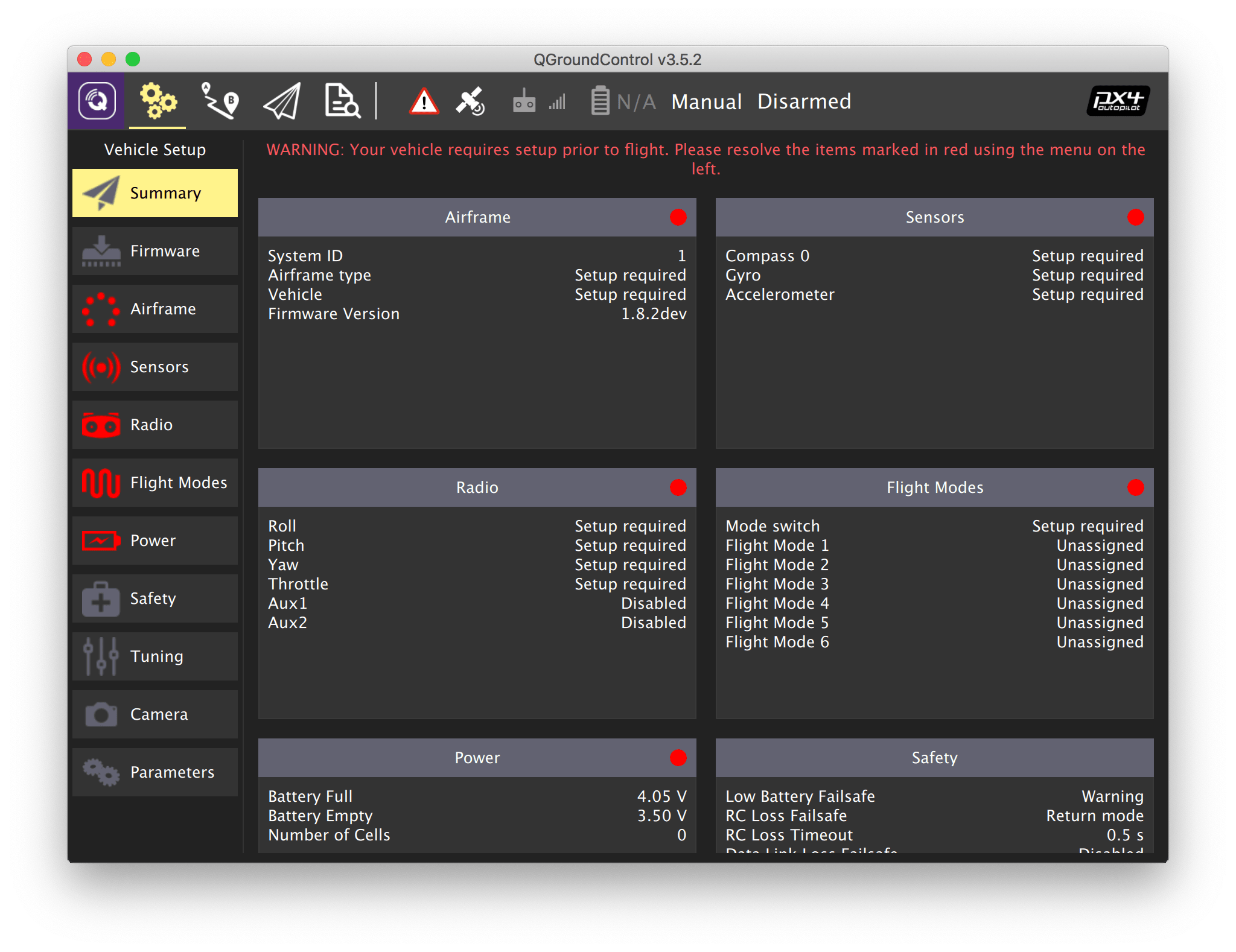
1. Параметры, нуждающиеся в настройке: *Airframe*, *Radio*, *Sensors*, *Flight Modes*.
2. Текущая прошивка контроллера.
3. Текущий полетный режим.
4. Сообщения об ошибках.
#### Выбор рамы
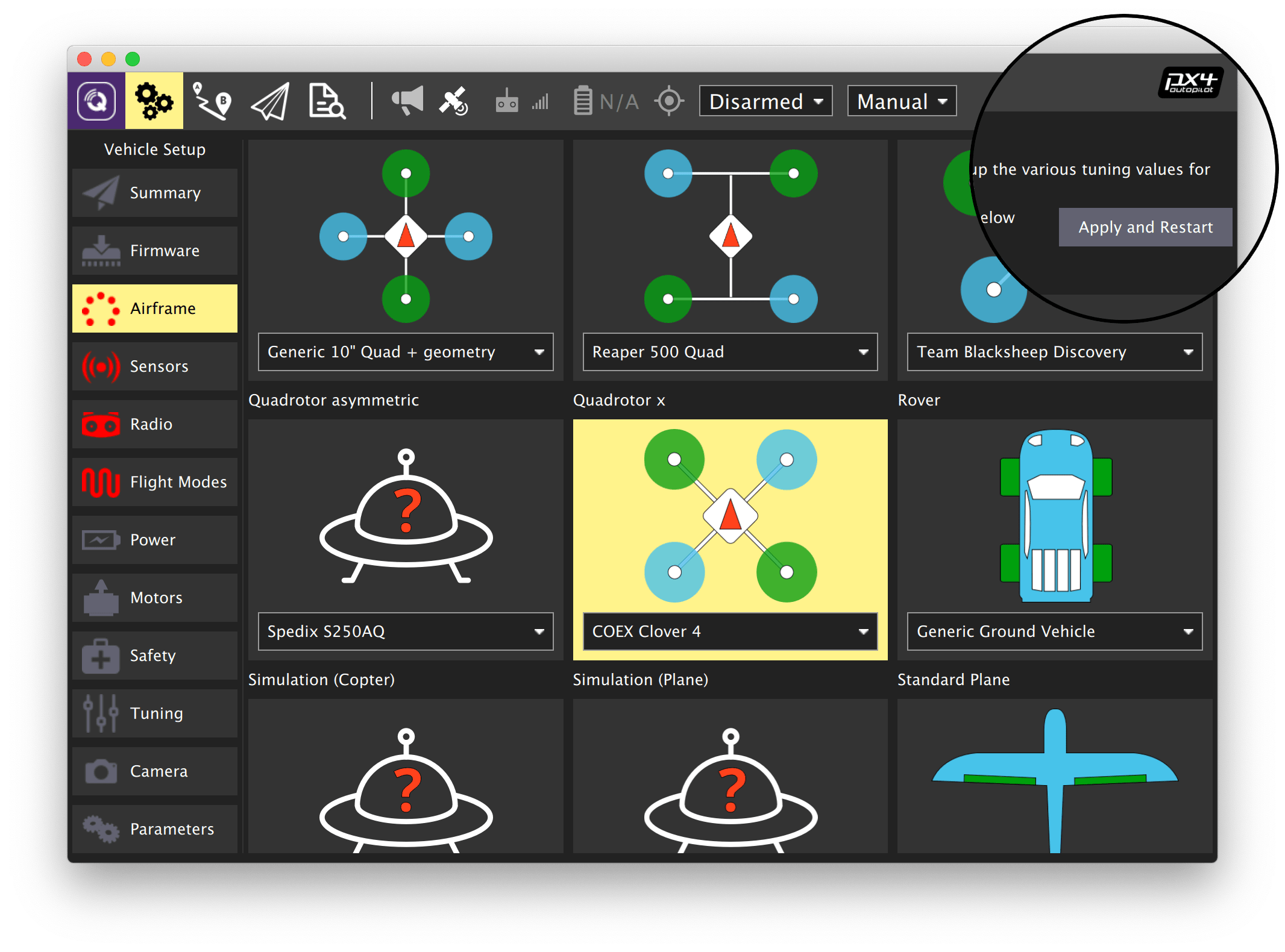
1. Зайдите во вкладку *Vehicle Setup*.
2. Выберите меню *Airframe*.
3. Выберите тип рамы *Quadrotor X*.
4. Для Клевера 4 выберите подтипа рамы *COEX Clover 4*. В ином случае – *Generic Quadrotor X*.
5. Переместитесь в начало списка и нажмите кнопку *Apply and Restart*, подтвердите нажатием *Apply*.
6. Дождитесь применения настроек и перезагрузки полетного контроллера.
#### Параметры
Для настройки параметров полетного контроллера войдите во вкладку *Vehicle Setup* и выберите меню *Parameters*. Вы можете использовать поле *Search* для поиска параметров по имени.
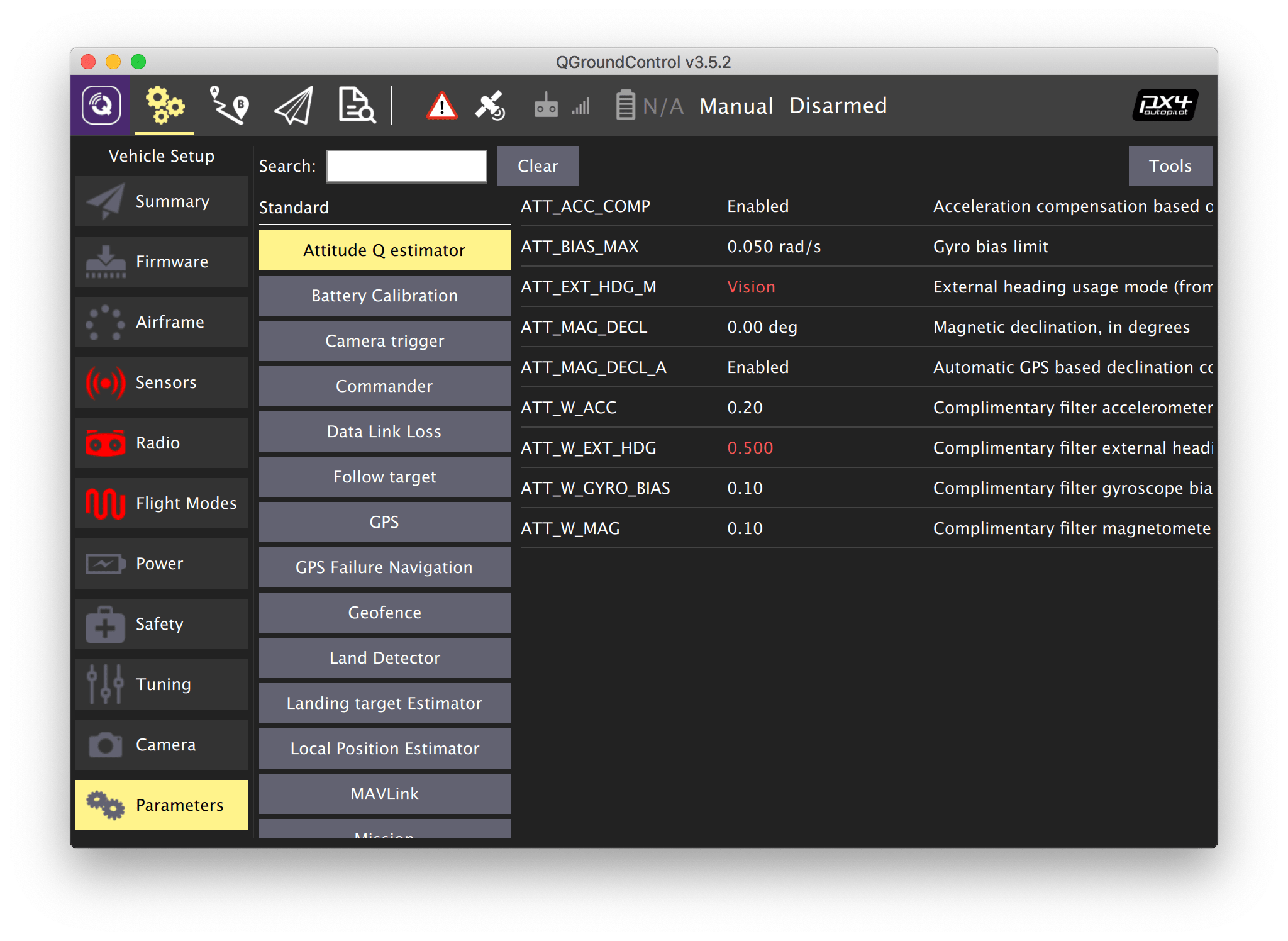
После установки параметра необходимо нажать кнопку *Save*. При необходимости – перезагрузить полетный контроллер, нажав кнопку *Tools*, затем *Reboot vehicle*.
**Настройка PID-регуляторов**
> Использование типа рамы *COEX Clover 4* не требует ввода коэффициентов PID.
**Усредненные коэффициенты PID для Клевера 4**
* `MC_PITCHRATE_P` = 0.087
* `MC_PITCHRATE_I` = 0.037
* `MC_PITCHRATE_D` = 0.0044
* `MC_PITCH_P` = 8.5
* `MC_ROLLRATE_P` = 0.087
* `MC_ROLLRATE_I` = 0.037
* `MC_ROLLRATE_D` = 0.0044
* `MC_ROLL_P` = 8.5
* `MPC_XY_VEL_P` = 0.11
* `MPC_XY_VEL_D` = 0.013
* `MPC_XY_P` = 1.1
* `MPC_Z_VEL_P` = 0.24
* `MPC_Z_P` = 1.2
**Усредненные коэффициенты PID для Клевера 3**
* `MC_PITCHRATE_P` = 0.145
* `MC_PITCHRATE_I` = 0.050
* `MC_PITCHRATE_D` = 0.0025
* `MC_ROLLRATE_P` = 0.145
* `MC_ROLLRATE_I` = 0.050
* `MC_ROLLRATE_D` = 0.0025
> Необходимо учитывать, что для идеального полета параметры PID-регуляторов подбираются вручную для каждого конкретного собранного квадрокоптера. Вы можете узнать больше об этом в статье "[Настройка PID-регуляторов](https://clover.coex.tech/ru/pid_tuning.html)".
**Параметры Circuit breaker**
1. Чтобы коптер мог летать с подключением по USB, установите параметр `CBRK_USB_CHK` в 197848.
2. Отключите проверку Safety Switch: `CBRK_IO_SAFETY` = 22027.
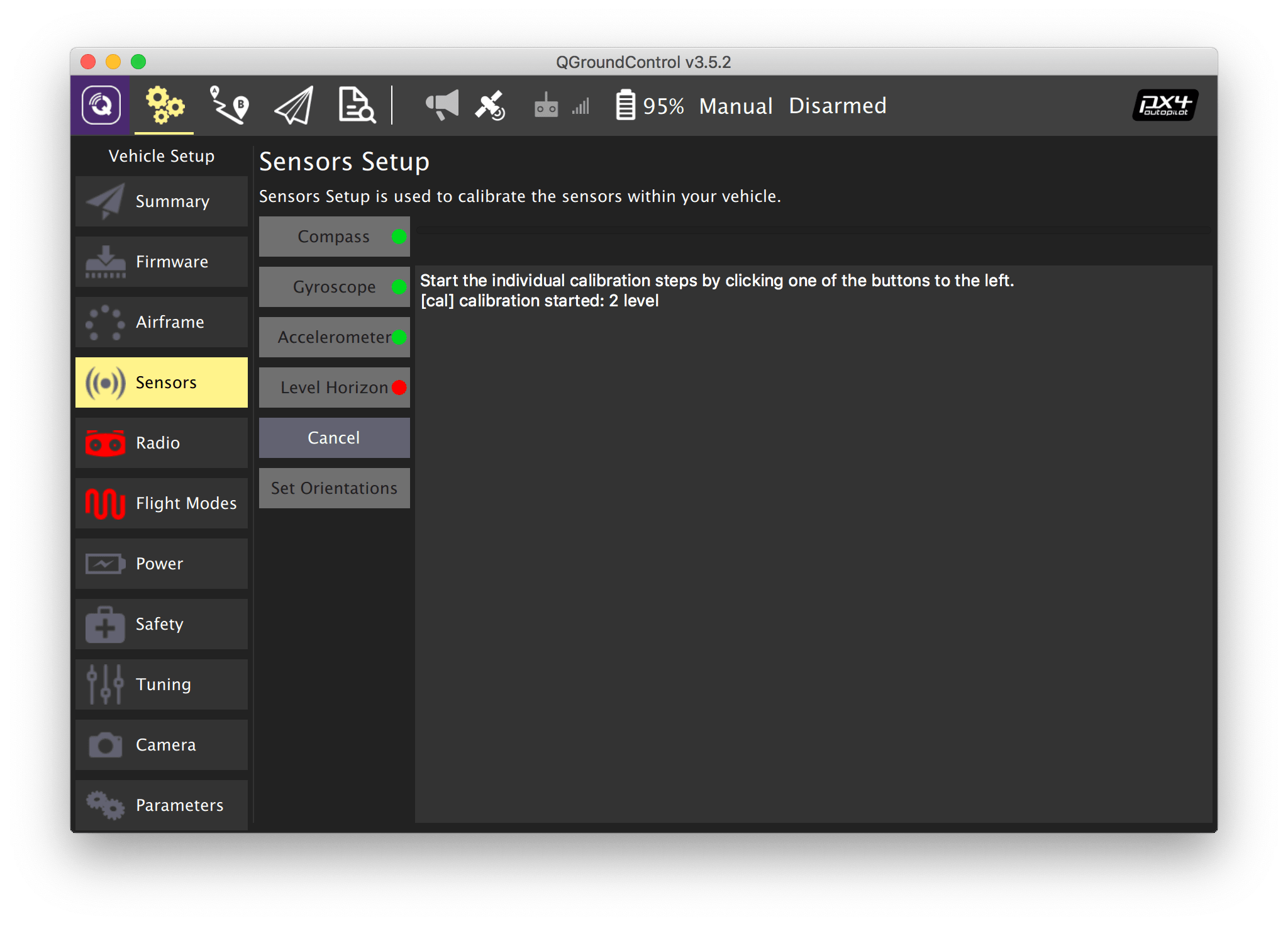
## Калибровка датчиков
Чтобы откалибровать датчики зайдите во вкладку *Vehicle Setup* и выберите меню *Sensors*.
> Если вы используете полетный контроллер [*COEX Pix*](https://clover.coex.tech/ru/coex_pix.html) и он установлен серворазъемами назад (как на изображениях в инструкции), то во всех графах *Autopilot Orientation* необходимо указать значение `ROTATION_ROLL_180_YAW_90`, иначе полетный контроллер будет некорректно воспринимать наклоны и повороты коптера.
### Компас
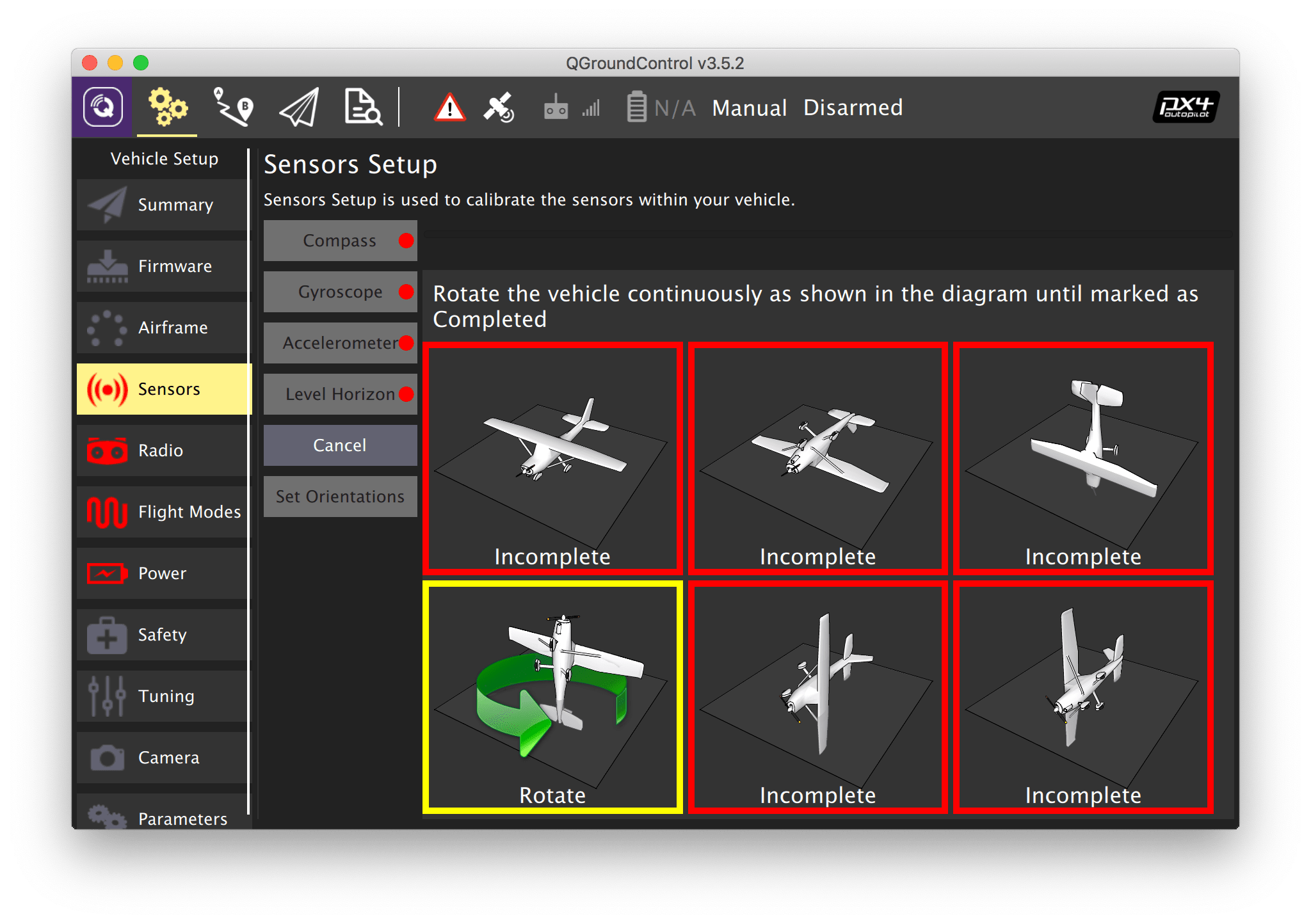
1. Выберите меню *Compass*.
2. Выберите ориентацию полетного контроллера – *ROTATION\_NONE* при условии, что полетный контроллер ориентирован передом к носу квадрокоптера.
3. Нажмите *OK*.
4. Последовательно устанавливайте квадрокоптер в каждую из указанных ориентаций до появления желтой рамки.
5. Вращайте квадрокоптер по направлению стрелки до появления зеленой рамки.
Дополнительная информация: .
### Гироскоп
1. Выберите меню *Gyroscope*
2. Установите квадрокоптер на ровную поверхность.
3. Нажмите *OK*.
4. Дождитесь окончания калибровки.
> Во время калибровки гироскопа квадрокоптер не должен менять своего положения, шататься и т. д.
Дополнительная информация: .
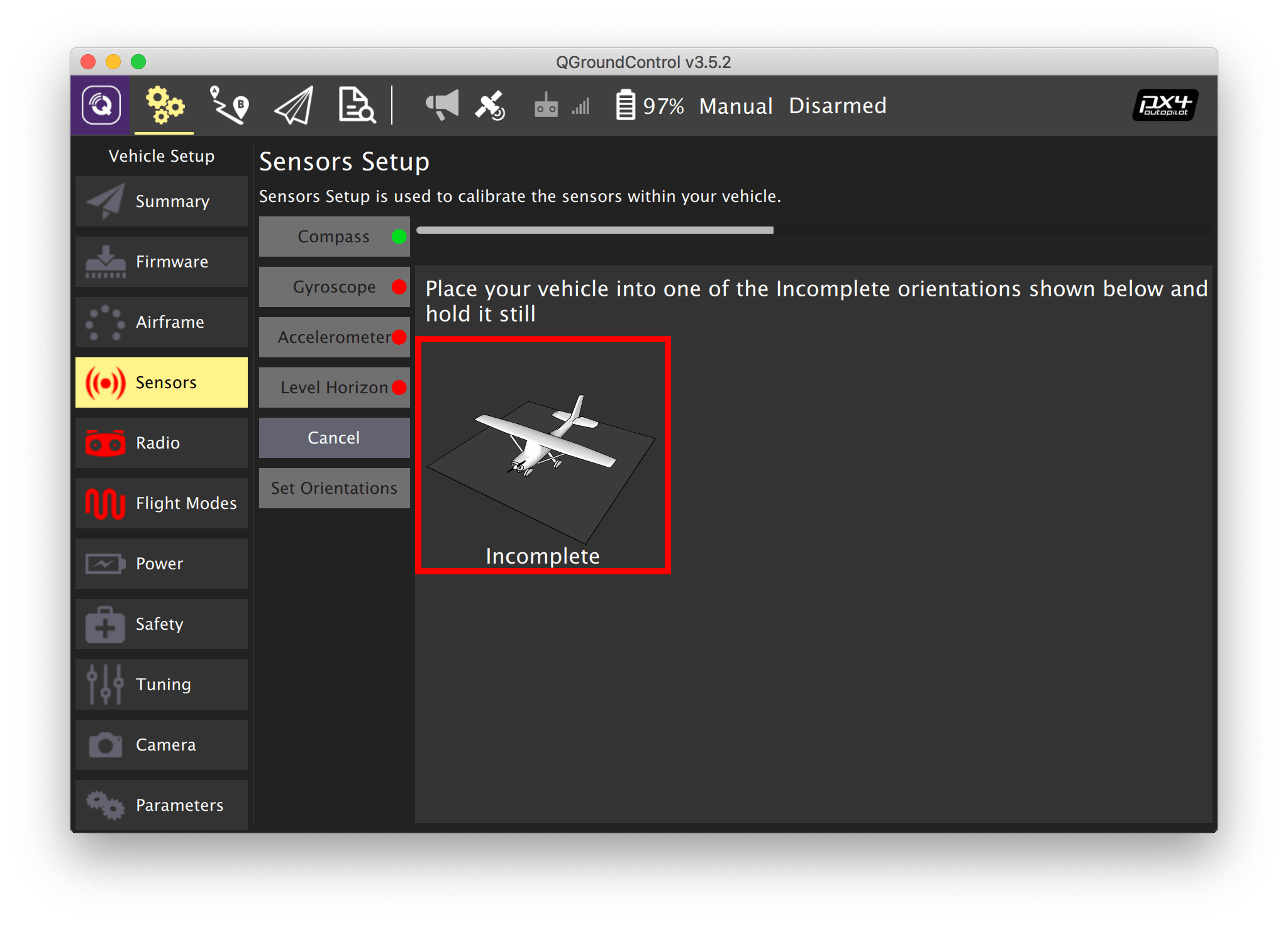
### Акселерометр
1. Выберите меню *Accelerometer*.
2. Выберите ориентацию полетного контроллера – *ROTATION\_NONE* при условии, что полетный контроллер ориентирован передом к носу квадрокоптера.
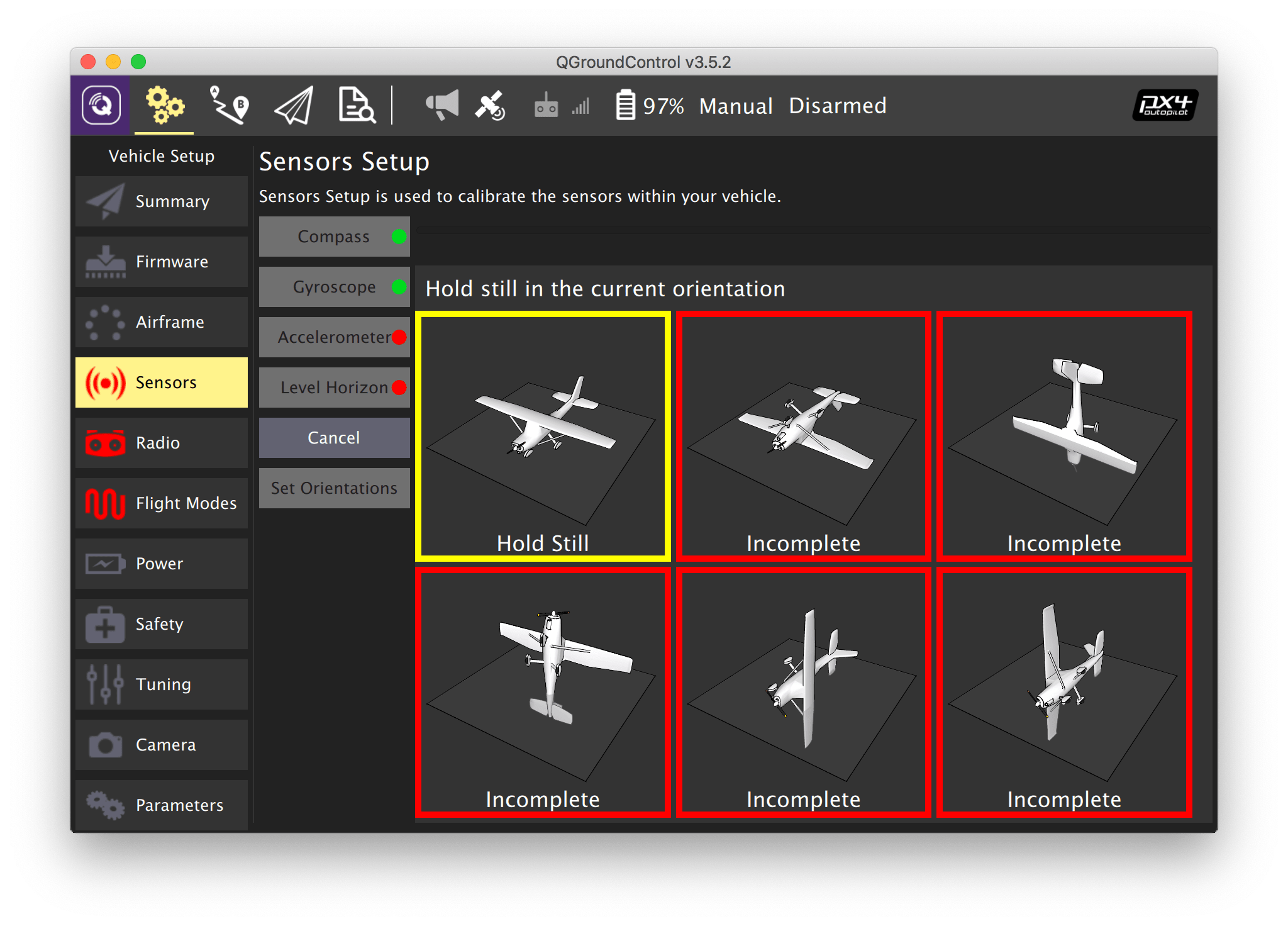
3. Последовательно устанавливайте квадрокоптер в каждую из указанных ориентаций до появления желтой рамки.
4. Держите квадрокоптер неподвижно до появления зеленой рамки.
Дополнительная информация: .
### Уровень горизонта
1. Выберите меню *Level Horizon*.
2. Выберите ориентацию полетного контроллера – *ROTATION\_NONE* при условии, что полетный контроллер ориентирован передом к носу квадрокоптера.
3. Установите квадрокоптер на ровную поверхность.
4. Нажмите *OK*.
5. Дождитесь окончания калибровки.
Дополнительная информация: .
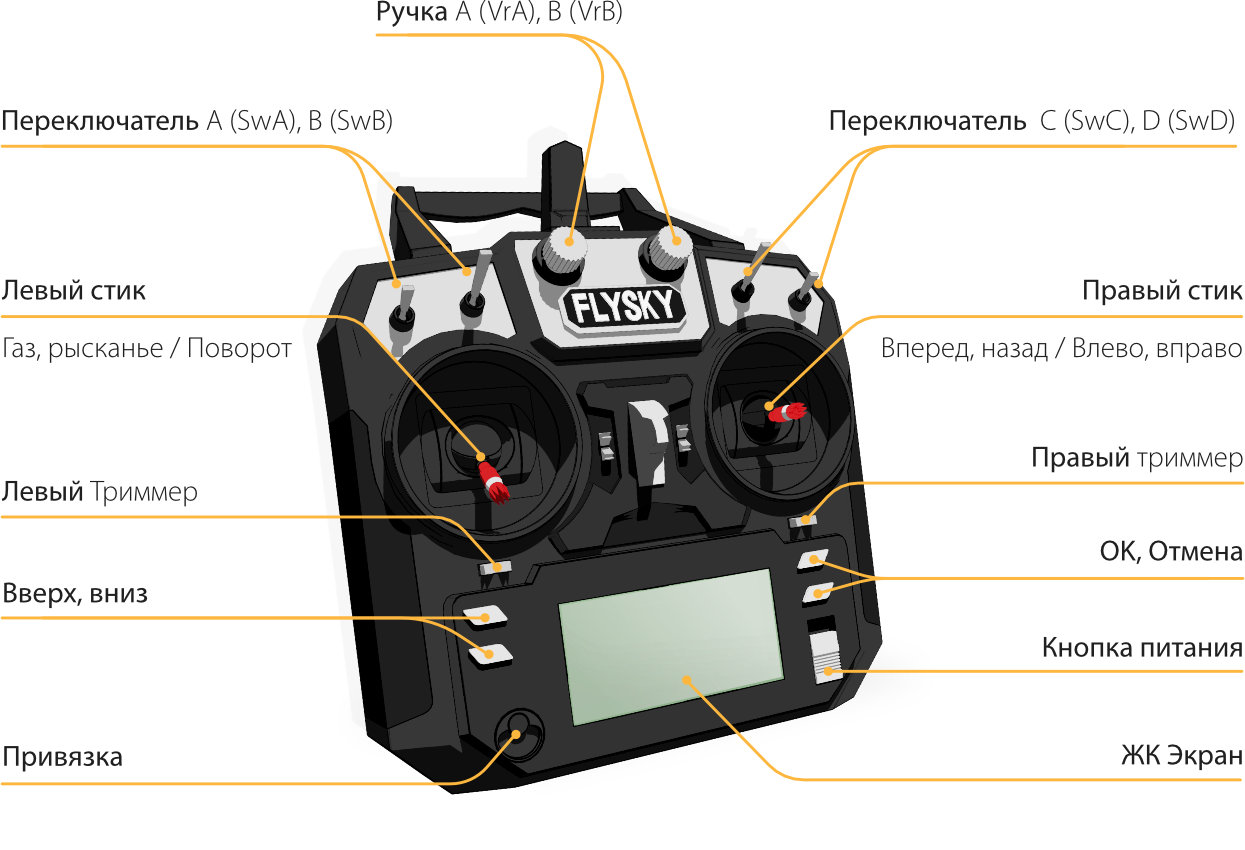
## Настройка пульта
Перед подключением и калибровкой пульта убедитесь, что:
* К коптеру не подключено внешнее питание АКБ.
* Пропеллеры не установлены на моторах.
### Подключение пульта
1. Зайдите во вкладку *Vehicle Setup* и выберите меню *Radio*.
2. Включите пульт, переводя переключатель *POWER* в верхнее положение.
3. Убедитесь, что связь с приемником установлена.
На ЖК Экране пульта высвечивается индикация:
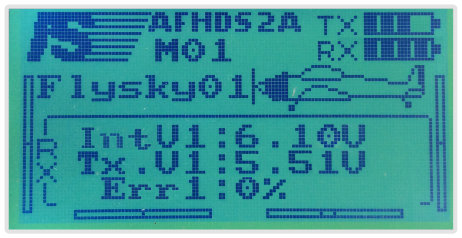 Светодиод на приемнике должен гореть непрерывно красным. При наличии проблем с подключением читайте статью "[Неисправности радиоаппаратуры](https://clover.coex.tech/ru/radioerrors.html)".
### Калибровка пульта
1. Нажмите кнопку *Calibrate*.
2. Установите триммеры *Throttle*, *Yaw*, *Pitch*, *Roll* в 0.
* Триммеры позволяют задавать смещение коптеру.
* Чтобы установить один из триммеров в 0, необходимо на пульте переместить указатель в центр до длительного звукового сигнала (писка).
3. Нажмите *OK*.
Светодиод на приемнике должен гореть непрерывно красным. При наличии проблем с подключением читайте статью "[Неисправности радиоаппаратуры](https://clover.coex.tech/ru/radioerrors.html)".
### Калибровка пульта
1. Нажмите кнопку *Calibrate*.
2. Установите триммеры *Throttle*, *Yaw*, *Pitch*, *Roll* в 0.
* Триммеры позволяют задавать смещение коптеру.
* Чтобы установить один из триммеров в 0, необходимо на пульте переместить указатель в центр до длительного звукового сигнала (писка).
3. Нажмите *OK*.
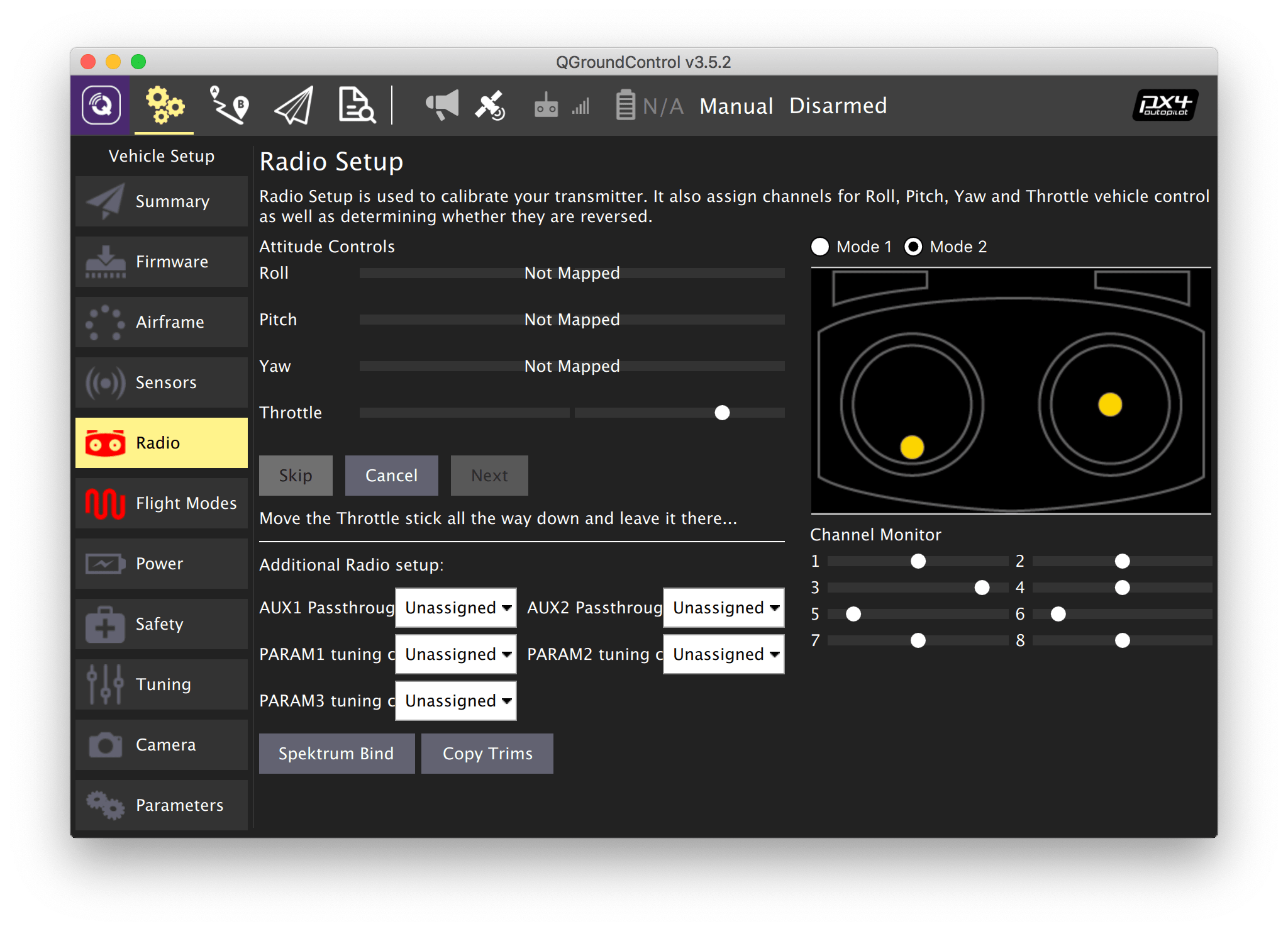 4. Переведите левый стик (газа) в минимум и нажмите *Next*.
5. Повторяйте движения стиками вслед за анимацией и читайте подсказки.
6. При появлении надписи *"Move all transmitter switches and/or dials back and forth to their extreme positions"* переключите SwA. SwD, VrA, VrB в их конечные положения.
7. Нажмите *Next*.
8. При появлении надписи *"All settings have been captured. Click Next to write the new parameters to your board"* нажмите *Next*.
Дополнительная информация: .
\
Полетные режимы
----------------------------------------------------------------------
**Режим** полетного контроллера PX4 определяет, как именно коптер (или другое ТС) должно себя вести: каким образом интерпретировать входящие команды и сигналы с пульта. Режим переключается одним из переключателей на пульте радиоуправления.
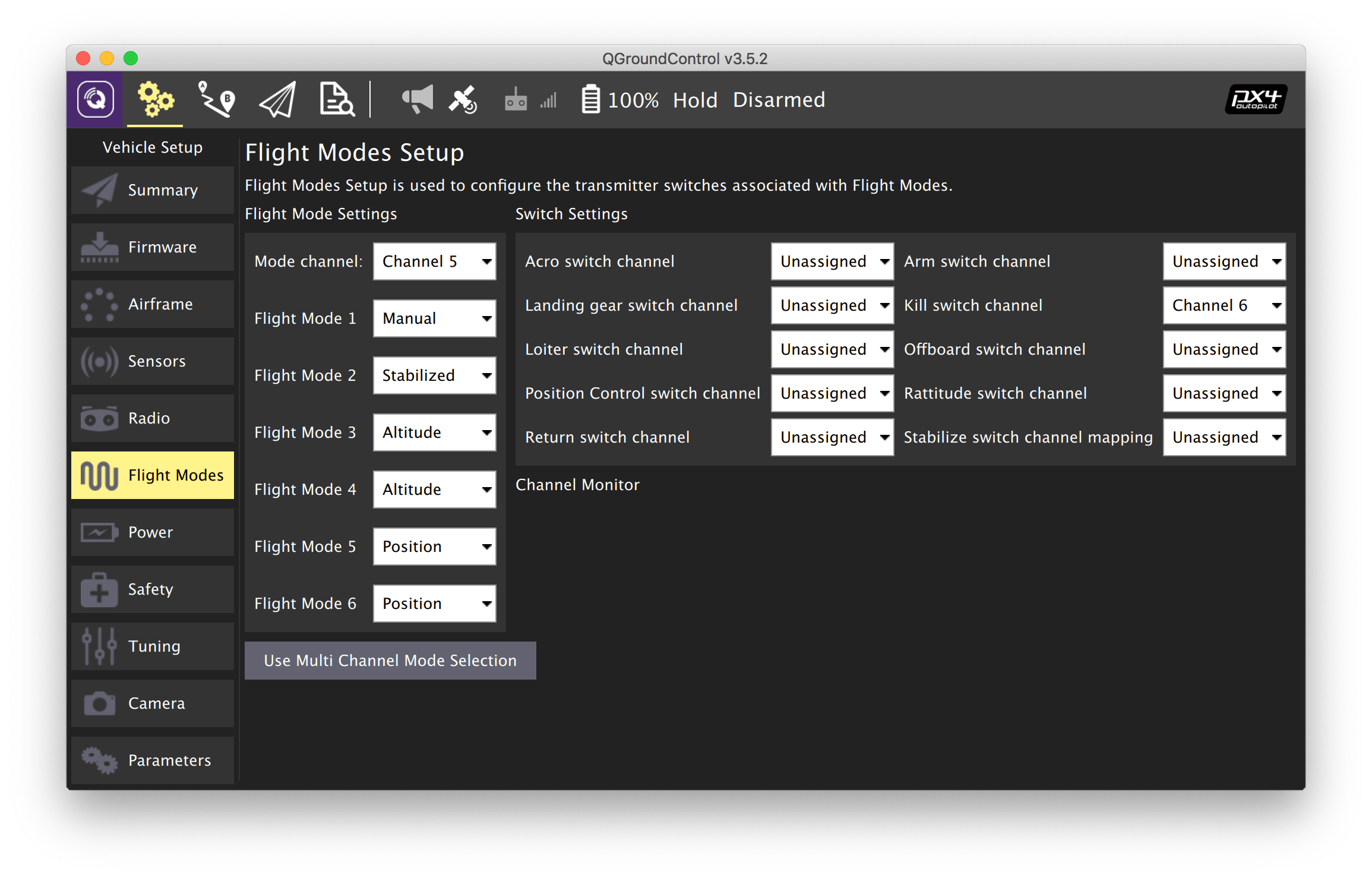
Чтобы настроить полетные режимы:
1. Зайдите во вкладку *Vehicle Setup*.
2. Выберите меню *Flight Modes*.
3. Установите переключатель режимов на переключатель SwC (Channel 6).
4. Выберите необходимые полетные режимы.
Рекомендуемые полетные режимы:
* Flight Mode 1: *Stabilized*.
* Flight Mode 4: *Altitude*.
* Flight Mode 6: *Position*.
5. Проверьте корректность переключения режимов, переключая переключатель на пульте.
6. Назначьте аварийное отключение моторов (*Kill switch*) на переключатель SwA (Channel 5).
### Подробное описание полетных режимов
#### Ручное управление
При ручном управлении пилот управляет квадрокоптером напрямую. GPS, данные с компьютерного зрения и барометр не используются. Для полетов в этих режимах необходимы хорошие навыки пилотирования мультикоптеров.
* **STABILIZED**/**MANUAL** — режим стабилизации горизонтального положения. Управление газом, углами наклона коптера по тангажу и крену, угловой скоростью по рысканью.
* **ACRO** — управление газом и угловой скоростью коптера по тангажу, крену и рысканью. Используется дрон-рейсерами и в шоу 3D-пилотирования для выполнения трюков.
* **RATTITUDE** — в центре правый стик аналогичен STABILIZED, по краям переходит в режим ACRO.
#### С использованием дополнительных датчиков
* **ALTCTL** (*Altitude*) — управление скоростью изменения высоты полета, углами по тангажу и крену и угловой скоростью по рысканью. Используется барометр (или иной датчик высоты).
* **POSCTL** (*Position*) — управление скоростями набора высоты, скоростью движения вперед/назад и вправо/влево, угловой скоростью по рысканью. Наиболее простой для полетов режим. Используется барометр, GPS, компьютерное зрение, другие датчики.
#### Автоматический полет
В этих режимах квадрокоптер игнорирует сигналы с пульта и летает по какой-либо автоматической программе.
* **OFFBOARD** — управление полетом с внешнего компьютера (например, [Raspberry Pi](https://clover.coex.tech/ru/raspberry.html)). Этот режим используется в Клевере для [программирования автономных полетов](https://clover.coex.tech/ru/simple_offboard.html).
* **AUTO.MISSION** – квадрокоптер выполняет заранее загруженную в квадрокоптер миссию. Миссия загружается при помощи QGroundControl, или по [MAVLink](https://clover.coex.tech/ru/mavlink.html). Этот режим чаще всего применяется для автоматических полетов по точкам с использованием GPS, например, для фотограмметрии.
* **AUTO.RTL** – коптер автоматически возвращается в точку взлета.
* **AUTO.LAND** – коптер выполняет посадку.
Дополнительная информация: .
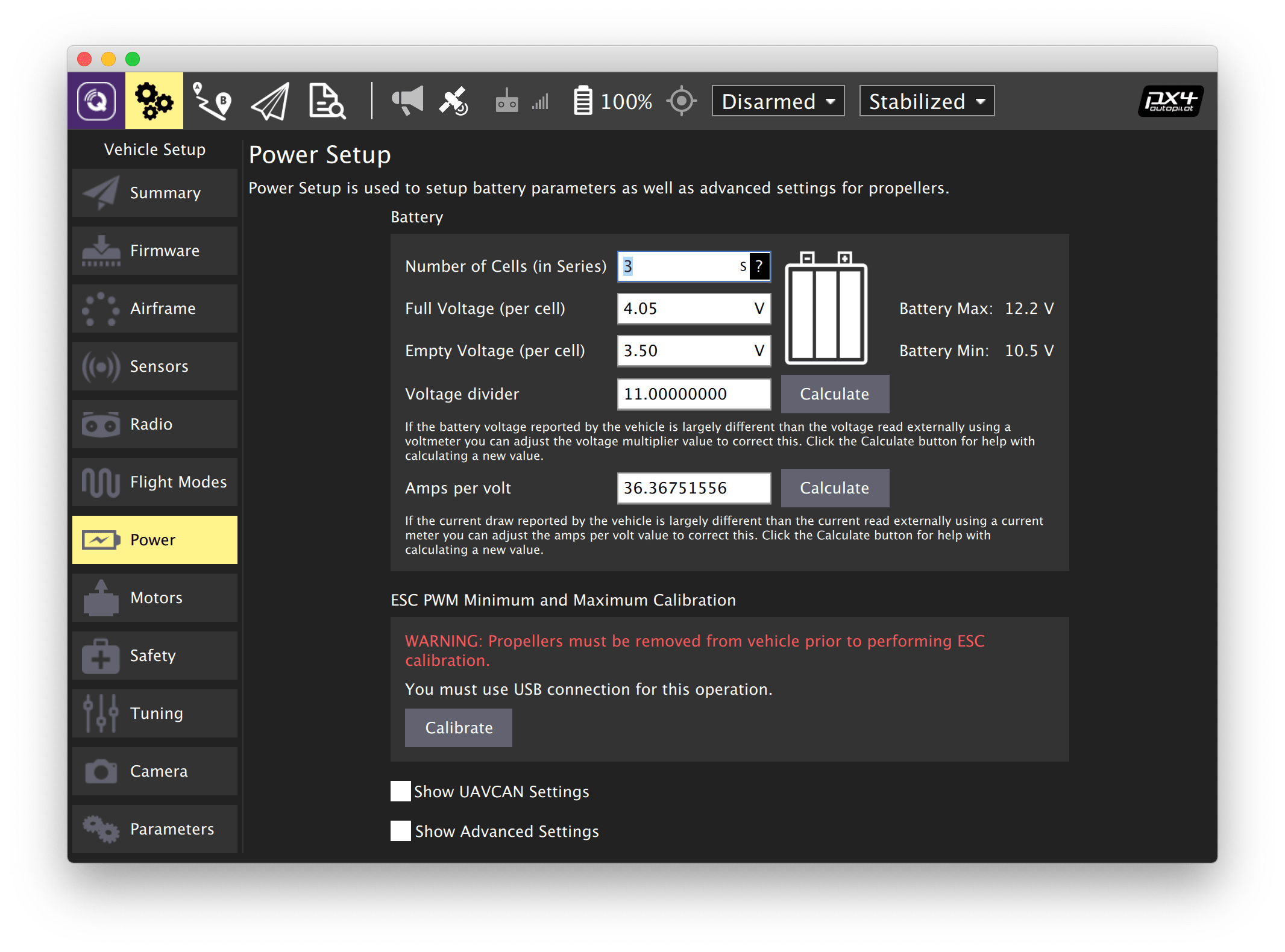
## Настройка питания
Чтобы откалибровать параметры, связанные с электропитанием, зайдите во вкладку *Vehicle Setup* и выберите меню *Power*.
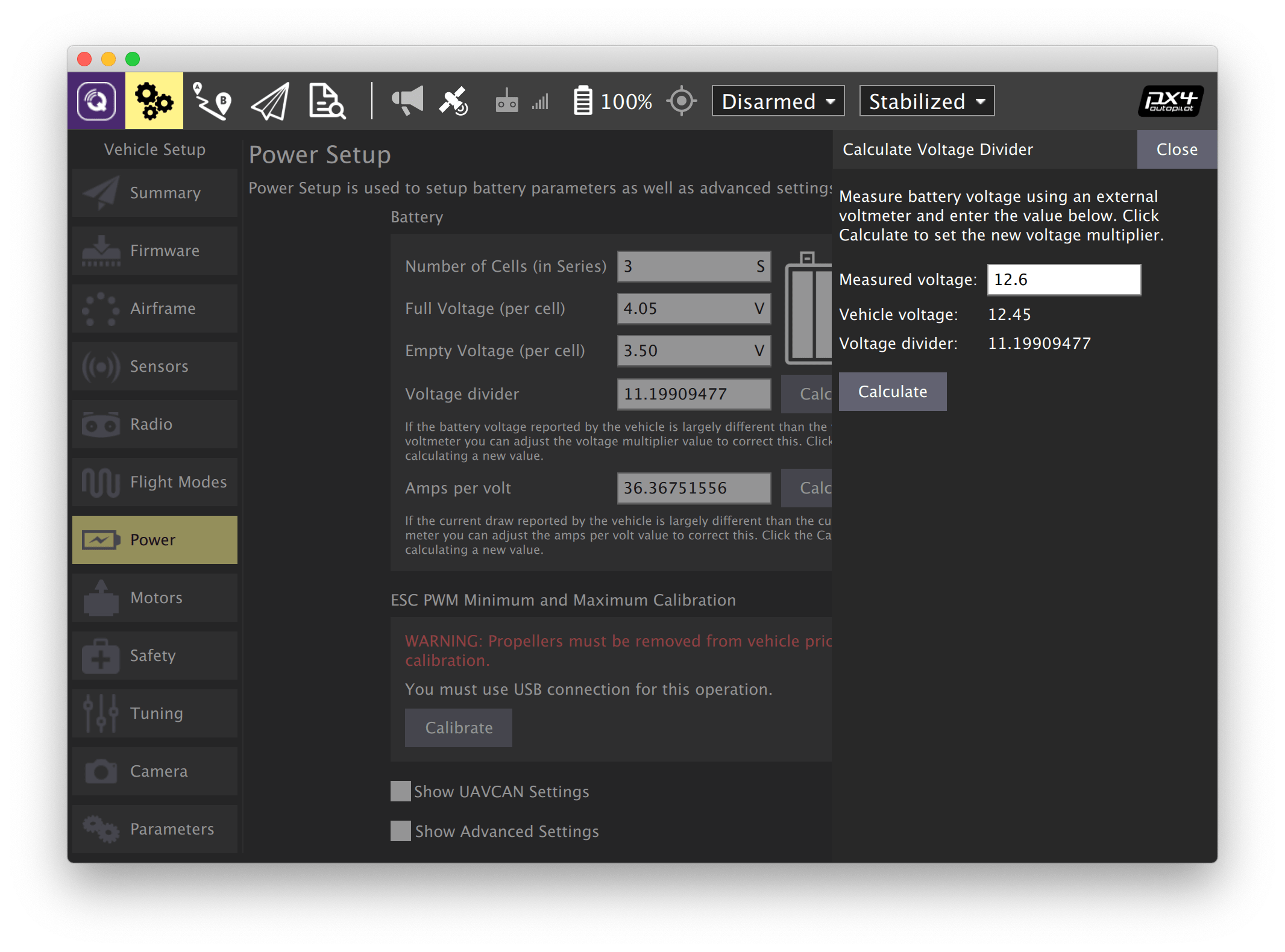
### Калибровка делителя напряжения
> Калибровка делителя напряжения должна выполняться с подключенным АКБ.
В случае отсутствия индикатора напряжения или невозможности ручной калибровки, установите усредненное значение делителя напряжения для комплекта Клевер 4 (*Voltage divider* = 11).
1. Установите параметр *Number of cells* в соответствии с количеством банок в АКБ (*3S* для Клевера 4).
2. Откалибруйте делитель напряжения:
* Подключите индикатор напряжения к балансировочному разъему АКБ.
* Нажмите кнопку *Calculate* напротив надписи *Voltage Divider*.
* Введите в открывшемся поле суммарное значение напряжения с индикатора напряжения.
* Нажмите *Close*, чтобы сохранить рассчитанное значение.
Дополнительная информация: .
### Калибровка регуляторов (ESC)
> **Никогда не выполняйте калибровку регуляторов с установленными пропеллерами.** В некоторых случаях моторы могут начать вращаться на максимальной скорости.
1. Убедитесь, что АКБ не подключена и пропеллеры сняты
2. Нажмите *Calibrate*.
3. После появлении надписи *Connect the battery now* подсоедините АКБ.
4. Дождитесь появления надписи *Calibration complete*.
Дополнительная информация: .
---
# Agent Instructions: Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://lahmeneffa.gitbook.io/docs-tkuik/programmirovanie-poletov/bystraya-nastroika-dlya-ruchnogo-pilotirovaniya.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.
4. Переведите левый стик (газа) в минимум и нажмите *Next*.
5. Повторяйте движения стиками вслед за анимацией и читайте подсказки.
6. При появлении надписи *"Move all transmitter switches and/or dials back and forth to their extreme positions"* переключите SwA. SwD, VrA, VrB в их конечные положения.
7. Нажмите *Next*.
8. При появлении надписи *"All settings have been captured. Click Next to write the new parameters to your board"* нажмите *Next*.
Дополнительная информация: .
\
Полетные режимы
----------------------------------------------------------------------
**Режим** полетного контроллера PX4 определяет, как именно коптер (или другое ТС) должно себя вести: каким образом интерпретировать входящие команды и сигналы с пульта. Режим переключается одним из переключателей на пульте радиоуправления.
Чтобы настроить полетные режимы:
1. Зайдите во вкладку *Vehicle Setup*.
2. Выберите меню *Flight Modes*.
3. Установите переключатель режимов на переключатель SwC (Channel 6).
4. Выберите необходимые полетные режимы.
Рекомендуемые полетные режимы:
* Flight Mode 1: *Stabilized*.
* Flight Mode 4: *Altitude*.
* Flight Mode 6: *Position*.
5. Проверьте корректность переключения режимов, переключая переключатель на пульте.
6. Назначьте аварийное отключение моторов (*Kill switch*) на переключатель SwA (Channel 5).

### Подробное описание полетных режимов
#### Ручное управление
При ручном управлении пилот управляет квадрокоптером напрямую. GPS, данные с компьютерного зрения и барометр не используются. Для полетов в этих режимах необходимы хорошие навыки пилотирования мультикоптеров.
* **STABILIZED**/**MANUAL** — режим стабилизации горизонтального положения. Управление газом, углами наклона коптера по тангажу и крену, угловой скоростью по рысканью.
* **ACRO** — управление газом и угловой скоростью коптера по тангажу, крену и рысканью. Используется дрон-рейсерами и в шоу 3D-пилотирования для выполнения трюков.
* **RATTITUDE** — в центре правый стик аналогичен STABILIZED, по краям переходит в режим ACRO.
#### С использованием дополнительных датчиков
* **ALTCTL** (*Altitude*) — управление скоростью изменения высоты полета, углами по тангажу и крену и угловой скоростью по рысканью. Используется барометр (или иной датчик высоты).
* **POSCTL** (*Position*) — управление скоростями набора высоты, скоростью движения вперед/назад и вправо/влево, угловой скоростью по рысканью. Наиболее простой для полетов режим. Используется барометр, GPS, компьютерное зрение, другие датчики.
#### Автоматический полет
В этих режимах квадрокоптер игнорирует сигналы с пульта и летает по какой-либо автоматической программе.
* **OFFBOARD** — управление полетом с внешнего компьютера (например, [Raspberry Pi](https://clover.coex.tech/ru/raspberry.html)). Этот режим используется в Клевере для [программирования автономных полетов](https://clover.coex.tech/ru/simple_offboard.html).
* **AUTO.MISSION** – квадрокоптер выполняет заранее загруженную в квадрокоптер миссию. Миссия загружается при помощи QGroundControl, или по [MAVLink](https://clover.coex.tech/ru/mavlink.html). Этот режим чаще всего применяется для автоматических полетов по точкам с использованием GPS, например, для фотограмметрии.
* **AUTO.RTL** – коптер автоматически возвращается в точку взлета.
* **AUTO.LAND** – коптер выполняет посадку.
Дополнительная информация: .
## Настройка питания
Чтобы откалибровать параметры, связанные с электропитанием, зайдите во вкладку *Vehicle Setup* и выберите меню *Power*.
### Калибровка делителя напряжения
> Калибровка делителя напряжения должна выполняться с подключенным АКБ.
В случае отсутствия индикатора напряжения или невозможности ручной калибровки, установите усредненное значение делителя напряжения для комплекта Клевер 4 (*Voltage divider* = 11).
1. Установите параметр *Number of cells* в соответствии с количеством банок в АКБ (*3S* для Клевера 4).
2. Откалибруйте делитель напряжения:
* Подключите индикатор напряжения к балансировочному разъему АКБ.
* Нажмите кнопку *Calculate* напротив надписи *Voltage Divider*.
* Введите в открывшемся поле суммарное значение напряжения с индикатора напряжения.
* Нажмите *Close*, чтобы сохранить рассчитанное значение.

Дополнительная информация: .
### Калибровка регуляторов (ESC)
> **Никогда не выполняйте калибровку регуляторов с установленными пропеллерами.** В некоторых случаях моторы могут начать вращаться на максимальной скорости.
1. Убедитесь, что АКБ не подключена и пропеллеры сняты
2. Нажмите *Calibrate*.
3. После появлении надписи *Connect the battery now* подсоедините АКБ.
4. Дождитесь появления надписи *Calibration complete*.

Дополнительная информация: .
---
# Agent Instructions: Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://lahmeneffa.gitbook.io/docs-tkuik/programmirovanie-poletov/bystraya-nastroika-dlya-ruchnogo-pilotirovaniya.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.