полная справка по сборке и настройке всех узлов квадрокоптера. Данной справкой можно пользоваться на соревнованиях. Точно такая же как и по этой ссылке:
просмотр всех подключенных топиков. Это и просмотр картинки с камеры, просмотр карты Aruco и др.
| | Open web terminal |терминал, с помощью которого можно программировать квадрокоптер.
| | *View 3D vizualization* |3-х мерное представление вашего квадрокоптера. Здесь можно посмотреть правильно ли ориентирована ваша камера. Для этого посмотрите на белый шлейф идущий к камере, его направление должно совпадать с 3-х мерной моделью.
| | *3D visualization for markers map* | 3- х мерное представление вашего квадрокоптера, но уже с изображением карты Aruco меток. Здесь можно посмотреть правильно ли отображается квадрокоптер относительно карты меток. | ## ## **Настройка параметров в QGroundControl** 1. Перейдите во вкладку Parameters:  2\. Теперь вам необходимо перейти по ссылке и изменить ваши параметры на те, которые указаны по ссылке: [https://clover.coex.tech/ru/aruco\_map.html](https://vk.com/away.php?to=https%3A%2F%2Fclover.coex.tech%2Fru%2Faruco_map.html\&cc_key=). Используйте поиск для поиска нужного параметра:  Какие именно параметры переносить, я выделил на рисунке ниже:  4\. Теперь произведите тоже самое, но уже по другой ссылке: [https://clover.coex.tech/ru/optical\_flow.html](https://vk.com/away.php?to=https%3A%2F%2Fclover.coex.tech%2Fru%2Foptical_flow.html\&cc_key=)**.**  {% hint style="warning" %} Подробнее по выбор параметров можно ознакомиться по ссылке: [https://clover.coex.tech/ru/px4\_parameters.html](https://vk.com/away.php?to=https%3A%2F%2Fclover.coex.tech%2Fru%2Fpx4_parameters.html\&cc_key=) {% endhint %} После внесение изменений в параметры необходимо перезапустить устройство. Для этого выберите кнопку Tools и в сплывающем меню выберите «Reboot vehicle»**.**  {% hint style="danger" %} **P.S.** Не забудьте во вкладке FLight modes назначить режим полета и kill switch для вашего пульта управления. Как это сделать описано по ссылке: [https://clover.coex.tech/ru/modes.html](https://vk.com/away.php?to=https%3A%2F%2Fclover.coex.tech%2Fru%2Fmodes.html\&cc_key=) {% endhint %} ## Командная строка В Linux-системах, к семейству которых принадлежит используемая на Raspberry Pi ОС Raspbian, основным способом взаимодействия пользователя с системой является командная строка. Для работы с командной строкой [откройте SSH-соединение](https://clover.coex.tech/ru/ssh.html) с Raspberry Pi. ### Базовые команды > Двойное нажатие клавиши `Tab ↹` позволяет автоматически дополнить вводимую команду или аргумент. Показать содержимое текущей директории: ```bash ls ``` Перейти в директорию: ```bash cd catkin_ws/src/clover/clover/launch/ ``` Перейти на директорию выше: ```bash cd .. ``` Вывести путь к текущей директории: ```bash pwd ``` Вывести содержимое файла `file.py`: ```bash cat file.py ``` Запустить Python-скрипт `file.py`: ```bash python3 file.py ``` Перезагрузить Raspberry Pi: ```bash sudo reboot ``` Для завершения работающей программы нажмите комбинацию клавиш `Ctrl`+`C`. Читайте больше о командах Linux в документации Raspberry Pi: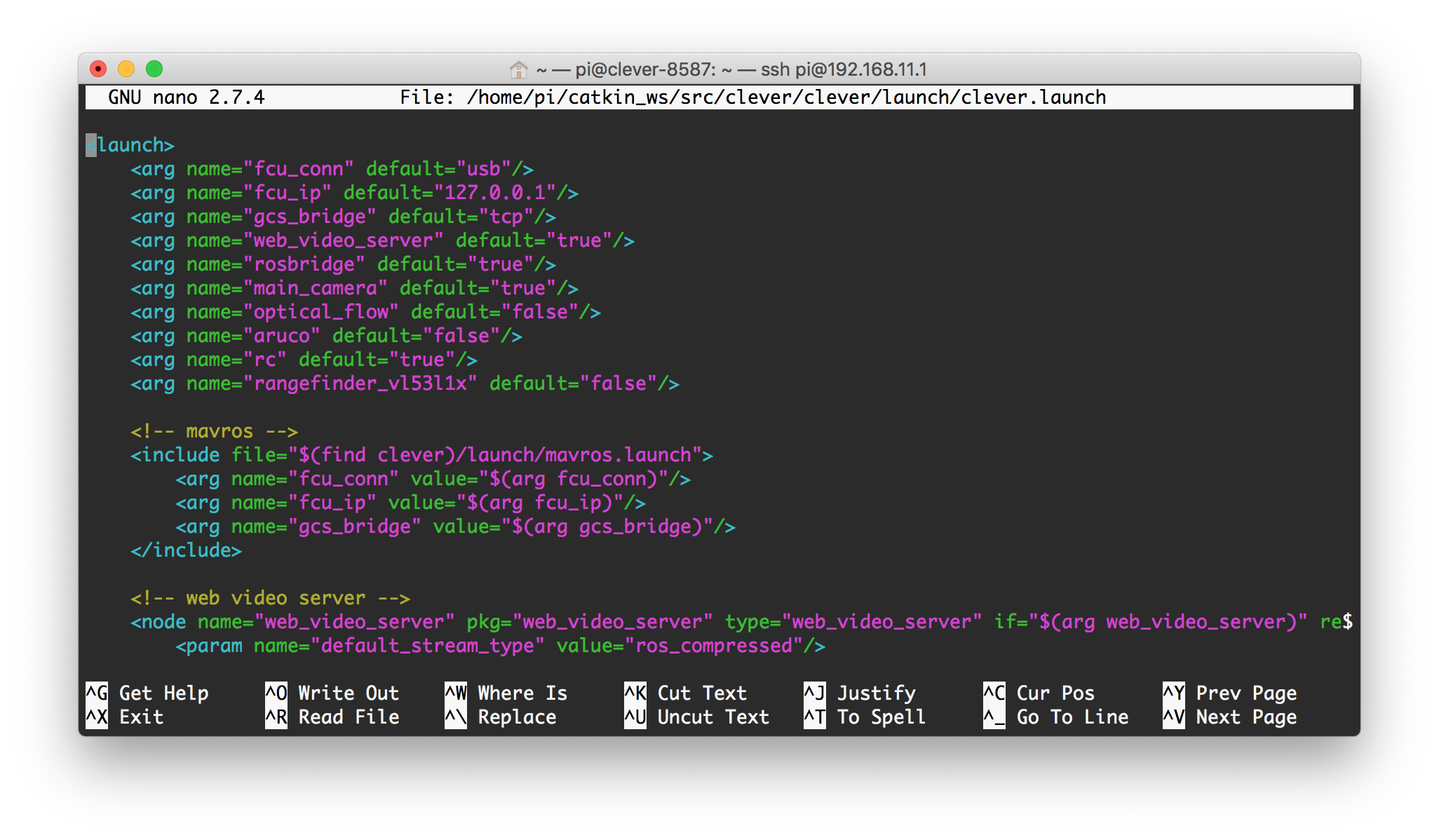 2. Отредактируйте файл.
3. Для выхода с сохранением нажмите `Ctrl`+`X`, `Y`, `Enter`.
4. При изменении .launch-файлов необходимо перезапустить пакет `clover`:
```bash
sudo systemctl restart clover
```
Для редактирования файлов также можно использовать и другие редакторы, например, **vim**.
### Сброс изменений
Для сброса изменений всех файлов, относящихся к пакету Клевера (`launch`-файлы) используйте git:
```bash
cd ~/catkin_ws/src/clover
git checkout .
sudo systemctl restart clover
```
## Настройка камеры
> Документация для версий [образа](https://clover.coex.tech/ru/image.html), начиная с **0.20**. Для более ранних версий см. [документацию для версии **0.19**](https://github.com/CopterExpress/clover/blob/v0.19/docs/ru/camera_frame.md).
Для корректной работы всех функций, связанных с компьютерным зрением (в том числе [полета по ArUco-маркерам](https://clover.coex.tech/ru/aruco.html) и [Optical Flow](https://clover.coex.tech/ru/optical_flow.html)) необходимо сфокусировать основную камеру, а также выставить ее расположение и ориентацию. Улучшить качество работы также может опциональная калибровка камеры.
### Настройка фокуса камеры
Для успешного осуществления полетов с использованием камеры, необходимо настроить фокус камеры.
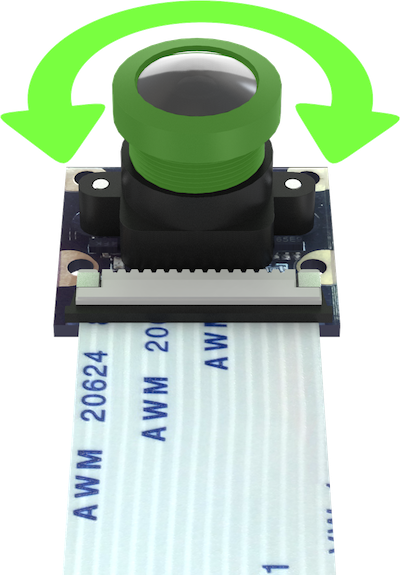
1. Откройте трансляцию изображения с камеры используя [web\_video\_server](https://clover.coex.tech/ru/web_video_server.html).
2. С помощью вращения объектива камеры добейтесь максимальной резкости деталей (предпочтительно на расстоянии предполагаемой высоты полета – 2–3 м).
| Расфокусированное изображение | Сфокусированное изображение |
| -------------------------------------------------- | ------------------------------------------------ |
| 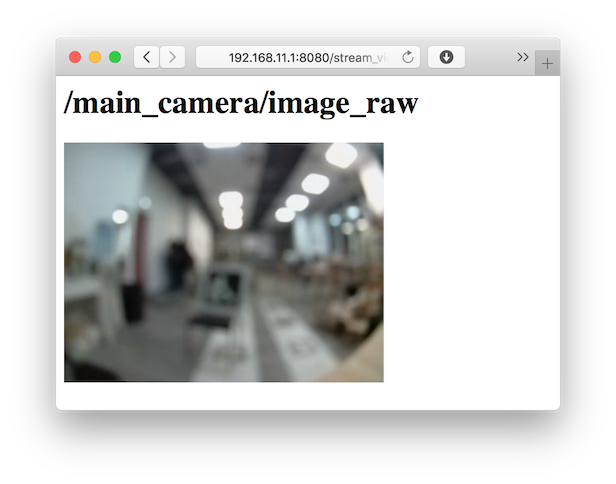 | 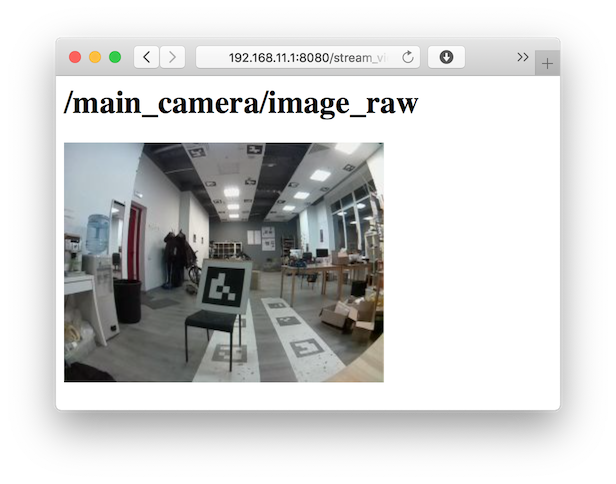 |
### Настройка расположения камеры
Расположение и ориентация камеры [задается в файле](https://clover.coex.tech/ru/cli.html#editing) `~/catkin_ws/src/clover/clover/launch/main_camera.launch`:
```xml
2. Отредактируйте файл.
3. Для выхода с сохранением нажмите `Ctrl`+`X`, `Y`, `Enter`.
4. При изменении .launch-файлов необходимо перезапустить пакет `clover`:
```bash
sudo systemctl restart clover
```
Для редактирования файлов также можно использовать и другие редакторы, например, **vim**.
### Сброс изменений
Для сброса изменений всех файлов, относящихся к пакету Клевера (`launch`-файлы) используйте git:
```bash
cd ~/catkin_ws/src/clover
git checkout .
sudo systemctl restart clover
```
## Настройка камеры
> Документация для версий [образа](https://clover.coex.tech/ru/image.html), начиная с **0.20**. Для более ранних версий см. [документацию для версии **0.19**](https://github.com/CopterExpress/clover/blob/v0.19/docs/ru/camera_frame.md).
Для корректной работы всех функций, связанных с компьютерным зрением (в том числе [полета по ArUco-маркерам](https://clover.coex.tech/ru/aruco.html) и [Optical Flow](https://clover.coex.tech/ru/optical_flow.html)) необходимо сфокусировать основную камеру, а также выставить ее расположение и ориентацию. Улучшить качество работы также может опциональная калибровка камеры.
### Настройка фокуса камеры
Для успешного осуществления полетов с использованием камеры, необходимо настроить фокус камеры.

1. Откройте трансляцию изображения с камеры используя [web\_video\_server](https://clover.coex.tech/ru/web_video_server.html).
2. С помощью вращения объектива камеры добейтесь максимальной резкости деталей (предпочтительно на расстоянии предполагаемой высоты полета – 2–3 м).
| Расфокусированное изображение | Сфокусированное изображение |
| -------------------------------------------------- | ------------------------------------------------ |
|  |  |
### Настройка расположения камеры
Расположение и ориентация камеры [задается в файле](https://clover.coex.tech/ru/cli.html#editing) `~/catkin_ws/src/clover/clover/launch/main_camera.launch`:
```xml